ElasticSearch搜索技术深入及集群架构原理
Elasticsearch架构原理
Elasticsearch的节点类型
在Elasticsearch主要分成两类节点,一类是Master,一类是DataNode。
Master节点
在Elasticsearch启动时,会选举出来一个Master节点。当某个节点启动后,然后使用Zen Discovery机制找到集群中的其他节点,并建立连接。
discovery.seed_hosts: [“192.168.21.130”, “192.168.21.131”, “192.168.21.132”]
并从候选主节点中选举出一个主节点。
cluster.initial_master_nodes: [“node1”, “node2”,”node3”]
Master节点主要负责:
管理索引(创建索引、删除索引)、分配分片
维护元数据
管理集群节点状态
不负责数据写入和查询,比较轻量级
一个Elasticsearch集群中,只有一个Master节点。在生产环境中,内存可以相对小一点,但机器要稳定。
DataNode节点
在Elasticsearch集群中,会有N个DataNode节点。DataNode节点主要负责:数据写入、数据检索,大部分Elasticsearch的压力都在DataNode节点上在生产环境中,内存最好配置大一些
分片和副本机制
分片(Shard)
Elasticsearch是一个分布式的搜索引擎,索引的数据也是分成若干部分,分布在不同的服务器节点中
分布在不同服务器节点中的索引数据,就是分片(Shard)。Elasticsearch会自动管理分片,如果发现分片分布不均衡,就会自动迁移
一个索引(index)由多个shard(分片)组成,而分片是分布在不同的服务器上的
副本
为了对Elasticsearch的分片进行容错,假设某个节点不可用,会导致整个索引库都将不可用。所以,需要对分片进行副本容错。每一个分片都会有对应的副本。
在Elasticsearch中,默认创建的索引为1个分片、每个分片有1个主分片和1个副本分片。
每个分片都会有一个Primary Shard(主分片),也会有若干个Replica Shard(副本分片)
Primary Shard和Replica Shard不在同一个节点上
指定分片、副本数量
1 | // 创建指定分片数量、副本数量的索引 |
Elasticsearch重要工作流程
Elasticsearch文档写入原理
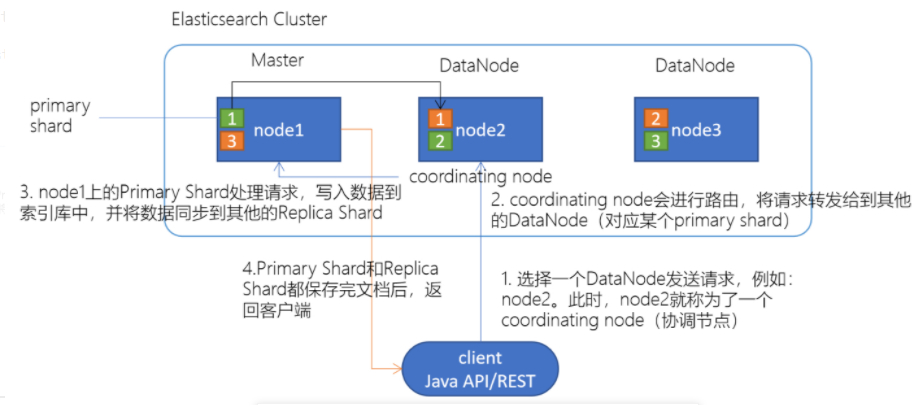
1.选择任意一个DataNode发送请求,例如:node2。此时,node2就成为一个coordinating node(协调节点)
2.计算得到文档要写入的分片
shard = hash(routing) % number_of_primary_shards
routing 是一个可变值,默认是文档的 _id
3.coordinating node会进行路由,将请求转发给对应的primary shard所在的DataNode(假设primary shard在node1、replica shard在node2)
4.node1节点上的Primary Shard处理请求,写入数据到索引库中,并将数据同步到Replica shard
5.Primary Shard和Replica Shard都保存好了文档,返回client
Elasticsearch检索原理
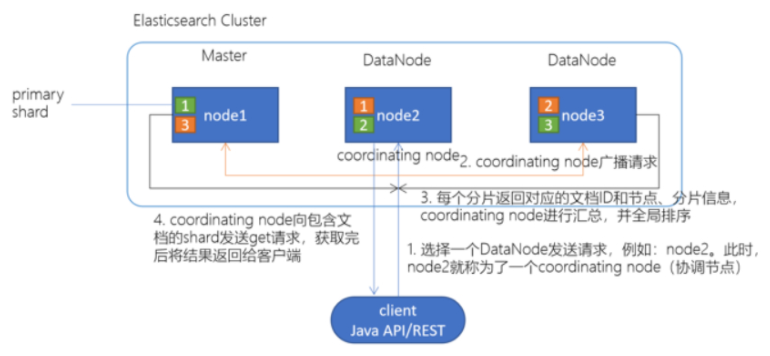
client发起查询请求,某个DataNode接收到请求,该DataNode就会成为协调节点(Coordinating Node)
协调节点(Coordinating Node)将查询请求广播到每一个数据节点,这些数据节点的分片会处理该查询请求
每个分片进行数据查询,将符合条件的数据放在一个优先队列中,并将这些数据的文档ID、节点信息、分片信息返回给协调节点
协调节点将所有的结果进行汇总,并进行全局排序
协调节点向包含这些文档ID的分片发送get请求,对应的分片将文档数据返回给协调节点,最后协调节点将数据返回给客户端
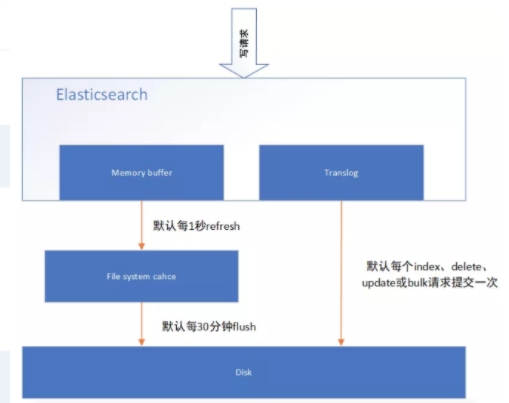
Elasticsearch准实时索引实现
溢写到文件系统缓存
当数据写入到ES分片时,会首先写入到内存中,然后通过内存的buffer生成一个segment,并刷到文件系统缓存中,数据可以被检索(注意不是直接刷到磁盘)
ES中默认1秒,refresh一次
写translog保障容错
在写入到内存中的同时,也会记录translog日志,在refresh期间出现异常,会根据translog来进行数据恢复
等到文件系统缓存中的segment数据都刷到磁盘中,清空translog文件
flush到磁盘
ES默认每隔30分钟会将文件系统缓存的数据刷入到磁盘
segment合并
Segment太多时,ES定期会将多个segment合并成为大的segment,减少索引查询时IO开销,此阶段ES会真正的物理删除(之前执行过的delete的数据)
手工控制搜索结果精准度
下述搜索中,如果document中的remark字段包含java或developer词组,都符合搜索条件。
1 | GET /es_db/_search |
如果需要搜索的document中的remark字段,包含java和developer词组,则需要使用下述语法:
1 | GET /es_db/_search |
上述语法中,如果将operator的值改为or。则与第一个案例搜索语法效果一致。默认的ES执行搜索的时候,operator就是or。
如果在搜索的结果document中,需要remark字段中包含多个搜索词条中的一定比例,可以使用下述语法实现搜索。其中minimum_should_match可以使用百分比或固定数字。百分比代表query搜索条件中词条百分比,如果无法整除,向下匹配(如,query条件有3个单词,如果使用百分比提供精准度计算,那么是无法除尽的,如果需要至少匹配两个单词,则需要用67%来进行描述。如果使用66%描述,ES则认为匹配一个单词即可。)。固定数字代表query搜索条件中的词条,至少需要匹配多少个。
1 | GET /es_db/_search |
如果使用should+bool搜索的话,也可以控制搜索条件的匹配度。具体如下:下述案例代表搜索的document中的remark字段中,必须匹配java、developer、assistant三个词条中的至少2个。
1 | GET /es_db/_search |
match 的底层转换
其实在ES中,执行match搜索的时候,ES底层通常都会对搜索条件进行底层转换,来实现最终的搜索结果。如:
1 | GET /es_db/_search |
1 | GET /es_db/_search |
1 | GET /es_db/_search |
建议,如果不怕麻烦,尽量使用转换后的语法执行搜索,效率更高。
如果开发周期短,工作量大,使用简化的写法。
boost权重控制
搜索document中remark字段中包含java的数据,如果remark中包含developer或architect,则包含architect的document优先显示。(就是将architect数据匹配时的相关度分数增加)。
一般用于搜索时相关度排序使用。如:电商中的综合排序。将一个商品的销量,广告投放,评价值,库存,单价比较综合排序。在上述的排序元素中,广告投放权重最高,库存权重最低。
1 | GET /es_db/_search |
基于dis_max实现best fields策略进行多字段搜索
best fields策略: 搜索的document中的某一个field,尽可能多的匹配搜索条件。与之相反的是,尽可能多的字段匹配到搜索条件(most fields策略)。如百度搜索使用这种策略。
优点:精确匹配的数据可以尽可能的排列在最前端,且可以通过minimum_should_match来去除长尾数据,避免长尾数据字段对排序结果的影响。
长尾数据比如说我们搜索4个关键词,但很多文档只匹配1个,也显示出来了,这些文档其实不是我们想要的
缺点:相对排序不均匀。
dis_max语法: 直接获取搜索的多条件中的,单条件query相关度分数最高的数据,以这个数据做相关度排序。
下述的案例中,就是找name字段中rod匹配相关度分数或remark字段中java developer匹配相关度分数,哪个高,就使用哪一个相关度分数进行结果排序。
1 | GET /es_db/_search |
基于tie_breaker参数优化dis_max搜索效果
dis_max是将多个搜索query条件中相关度分数最高的用于结果排序,忽略其他query分数,在某些情况下,可能还需要其他query条件中的相关度介入最终的结果排序,这个时候可以使用tie_breaker参数来优化dis_max搜索。tie_breaker参数代表的含义是:将其他query搜索条件的相关度分数乘以参数值,再参与到结果排序中。如果不定义此参数,相当于参数值为0。所以其他query条件的相关度分数被忽略。
1 | GET /es_db/_search |
使用multi_match简化dis_max+tie_breaker
ES中相同结果的搜索也可以使用不同的语法语句来实现。不需要特别关注,只要能够实现搜索,就是完成任务!
1 | GET /es_db/_search |
cross fields搜索
cross fields : 一个唯一的标识,分部在多个fields中,使用这种唯一标识搜索数据就称为cross fields搜索。如:人名可以分为姓和名,地址可以分为省、市、区县、街道等。那么使用人名或地址来搜索document,就称为cross fields搜索。
实现这种搜索,一般都是使用most fields搜索策略。因为这就不是一个field的问题。
Cross fields搜索策略,是从多个字段中搜索条件数据。默认情况下,和most fields搜索的逻辑是一致的,计算相关度分数是和best fields策略一致的。一般来说,如果使用cross fields搜索策略,那么都会携带一个额外的参数operator。用来标记搜索条件如何在多个字段中匹配。
当然,在ES中也有cross fields搜索策略。具体语法如下:
1 | GET /es_db/_search |
上述语法代表的是,搜索条件中的java必须在name或remark字段中匹配,developer也必须在name或remark字段中匹配。
most field策略问题:most fields策略是尽可能匹配更多的字段,所以会导致精确搜索结果排序问题。又因为cross fields搜索,不能使用minimum_should_match来去除长尾数据。
所以在使用most fields和cross fields策略搜索数据的时候,都有不同的缺陷。所以商业项目开发中,都推荐使用best fields策略实现搜索。
copy_to组合fields
京东中,如果在搜索框中输入“手机”,点击搜索,那么是在商品的类型名称、商品的名称、商品的卖点、商品的描述等字段中,哪一个字段内进行数据的匹配?如果使用某一个字段做搜索不合适,那么使用_all做搜索是否合适?也不合适,因为_all字段中可能包含图片,价格等字段。
假设,有一个字段,其中的内容包括(但不限于):商品类型名称、商品名称、商品卖点等字段的数据内容。是否可以在这个特殊的字段上进行数据搜索匹配?
1 | { |
copy_to : 就是将多个字段,复制到一个字段中,实现一个多字段组合。copy_to可以解决cross fields搜索问题,在商业项目中,也用于解决搜索条件默认字段问题。
如果需要使用copy_to语法,则需要在定义index的时候,手工指定mapping映射策略。
copy_to语法:
1 | PUT /es_db/_mapping |
上述的mapping定义中,是新增了4个字段,分别是provice、city、street、address,其中provice、city、street三个字段的值,会自动复制到address字段中,实现一个字段的组合。那么在搜索地址的时候,就可以在address字段中做条件匹配,从而避免most fields策略导致的问题。在维护数据的时候,不需对address字段特殊的维护。因为address字段是一个组合字段,是由ES自动维护的。类似java代码中的推导属性。在存储的时候,未必存在,但是在逻辑上是一定存在的,因为address是由3个物理存在的属性province、city、street组成的。
近似匹配
前文都是精确匹配。如doc中有数据java assistant,那么搜索jave是搜索不到数据的。因为jave单词在doc中是不存在的。
如果搜索的语法是:
1 | GET _search |
如果需要的结果是有特殊要求,如:hello world必须是一个完整的短语,不可分割;或document中的field内,包含的hello和world单词,且两个单词之间离的越近,相关度分数越高。那么这种特殊要求的搜索就是近似搜索。包括hell搜索条件在hello world数据中搜索,包括h搜索提示等都数据近似搜索的一部分。
如上述特殊要求的搜索,使用match搜索语法就无法实现了。
match phrase
短语搜索。就是搜索条件不分词。代表搜索条件不可分割。
如果hello world是一个不可分割的短语,我们可以使用前文学过的短语搜索match phrase来实现。语法如下:
1 | GET _search |
match phrase原理 – term position
ES是如何实现match phrase短语搜索的?其实在ES中,使用match phrase做搜索的时候,也是和match类似,首先对搜索条件进行分词-analyze。将搜索条件拆分成hello和world。既然是分词后再搜索,ES是如何实现短语搜索的?
这里涉及到了倒排索引的建立过程。在倒排索引建立的时候,ES会先对document数据进行分词,如:
1 | GET _analyze |
分词的结果是:
1 | { |
从上述结果中,可以看到。ES在做分词的时候,除了将数据切分外,还会保留一个position。position代表的是这个词在整个数据中的下标。当ES执行match phrase搜索的时候,首先将搜索条件hello world分词为hello和world。然后在倒排索引中检索数据,如果hello和world都在某个document的某个field出现时,那么检查这两个匹配到的单词的position是否是连续的,如果是连续的,代表匹配成功,如果是不连续的,则匹配失败。
match phrase搜索参数 – slop
在做搜索操作的是,如果搜索参数是hello spark。而ES中存储的数据是hello world, java spark。那么使用match phrase则无法搜索到。在这个时候,可以使用match来解决这个问题。但是,当我们需要在搜索的结果中,做一个特殊的要求:hello和spark两个单词距离越近,document在结果集合中排序越靠前,这个时候再使用match则未必能得到想要的结果。
ES的搜索中,对match phrase提供了参数slop。slop代表match phrase短语搜索的时候,单词最多移动多少次,可以实现数据匹配。在所有匹配结果中,多个单词距离越近,相关度评分越高,排序越靠前。
这种使用slop参数的match phrase搜索,就称为近似匹配(proximity search)
如:
1 | 数据为: hello world, java spark |
匹配成功,不需要移动第三次即可匹配。
如果:
1 | 数据为: hello world, java spark |
匹配成功,不需要移动第五次即可匹配。
如果当slop移动次数使用完毕,还没有匹配成功,则无搜索结果。如果使用中文分词,则移动次数更加复杂,因为中文词语有重叠情况,很难计算具体次数,需要多次尝试才行。
测试案例:
英文:
1 | GET _analyze |
中文:
1 | GET _analyze |
前缀搜索 prefix search
使用前缀匹配实现搜索能力。通常针对keyword类型字段,也就是不分词的字段。
语法:
1 | GET /test_a/_search |
注意:针对前缀搜索,是对keyword类型字段而言。而keyword类型字段数据大小写敏感。
前缀搜索效率比较低。前缀搜索不会计算相关度分数。前缀越短,效率越低。如果使用前缀搜索,建议使用长前缀。因为前缀搜索需要扫描完整的索引内容,所以前缀越长,相对效率越高。
通配符搜索
ES中也有通配符。但是和java还有数据库不太一样。通配符可以在倒排索引中使用,也可以在keyword类型字段中使用。
常用通配符:
? - 一个任意字符
* - 0~n个任意字符
1 | GET /test_a/_search |
性能也很低,也是需要扫描完整的索引。不推荐使用。
正则搜索
ES支持正则表达式。可以在倒排索引或keyword类型字段中使用。
常用符号:
[] - 范围,如: [0-9]是0~9的范围数字
. - 一个字符
+ - 前面的表达式可以出现多次。
1 | GET /test_a/_search |
性能也很低,需要扫描完整索引。
搜索推荐
搜索推荐: search as your type, 搜索提示。如:索引中有若干数据 以“hello”开头,那么在输入hello的时候,推荐相关信息。(类似百度输入框)
语法:
1 | GET /test_a/_search |
其原理和match phrase类似,是先使用match匹配term数据(java),然后在 指定的slop移动次数范围内,前缀匹配(s),max_expansions是用于指定prefix 最多匹配多少个term(单词),超过这个数量就不再匹配了。
这种语法的限制是,只有最后一个term会执行前缀搜索。
执行性能很差,毕竟最后一个term是需要扫描所有符合slop要求的倒排索引的 term。
因为效率较低,如果必须使用,则一定要使用参数max_expansions。